
Multimedia Gallery

{kind=link}
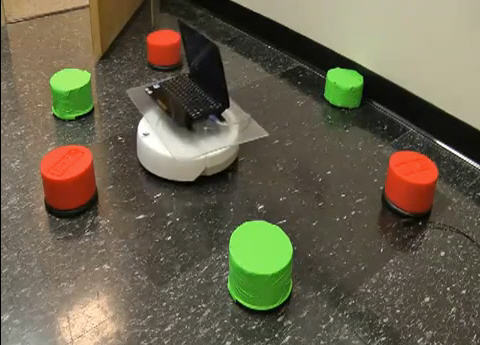
Video shows a robot learning to approach and avoid objects.
The video shows initial testing of a robot that has learned to associate likes and dislikes with a particular color in its environment. The video shows a robot navigating in the environment that consists of red and green cylindrical objects and the dynamics of learning in the Cog environment, which researchers used to generate the model that controls the robot.
Credit: Gennady Livitz, CELEST, Boston University
Images credited to the National Science Foundation, a federal agency, are in the public domain. The images were created by employees of the United States Government as part of their official duties or prepared by contractors as "works for hire" for NSF. You may freely use NSF-credited images and, at your discretion, credit NSF with a "Courtesy: National Science Foundation" notation.
Additional information about general usage can be found in Conditions.
Also Available:
Download the high-resolution JPG version of the image. (32 KB)
Use your mouse to right-click (Mac users may need to Ctrl-click) the link above and choose the option that will save the file or target to your computer.
Related story: Transforming robotics with biologically inspired learning models