
Multimedia Gallery
November 19, 2014
Images credited to the National Science Foundation, a federal agency, are in the public domain. The images were created by employees of the United States Government as part of their official duties or prepared by contractors as "works for hire" for NSF. You may freely use NSF-credited images and, at your discretion, credit NSF with a "Courtesy: National Science Foundation" notation.
Additional information about general usage can be found in Conditions.
{kind=link}
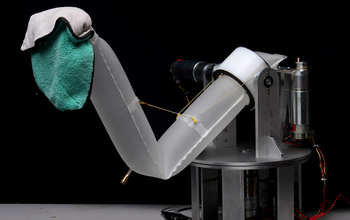
Soft inflatable robot arm from Carnegie Mellon is actuated using cables, motors and pneumatics.
Soft Inflatable Robot Arm. The inflatable arm has no rigid components in its structure and derives strength from pressurized air. The arm is actuated using,cables, motors and pneumatics.
Credit: Sanan/CMU
Images credited to the National Science Foundation, a federal agency, are in the public domain. The images were created by employees of the United States Government as part of their official duties or prepared by contractors as "works for hire" for NSF. You may freely use NSF-credited images and, at your discretion, credit NSF with a "Courtesy: National Science Foundation" notation.
Additional information about general usage can be found in Conditions.
Also Available:
Download the high-resolution JPG version of the image. (2.4 MB)
Use your mouse to right-click (Mac users may need to Ctrl-click) the link above and choose the option that will save the file or target to your computer.
Related story: From cognition to control: Fundamental research continues to advance cooperative robots