
All Images
Research News
Insects Inspire Robot Design

The research methodology John Schmitt and his collaborators use is an iterative process that utilizes animal experiments and reduced-order locomotion models to inform robotic design. The models aid the development and testing of high-level control strategies that can produce robust and efficient locomotion. Comparison of the animal dynamics to both the reduced-order model and robotic dynamics can test our understanding of the underlying principles that animals employ to achieve their remarkable locomotion performance.
Credit: Robert Full, University of California, Berkeley, and Jonathan Clark, Florida State University
Download the high-resolution JPG version of the image. (164 KB)
Use your mouse to right-click (Mac users may need to Ctrl-click) the link above and choose the option that will save the file or target to your computer.
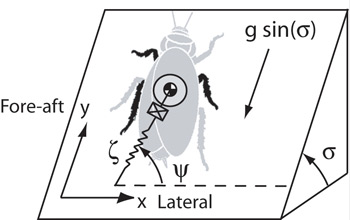
Illustration of the reduced-order, lateral-plane model utilized for investigating locomotion performance on inclines. The cockroach is modeled by a point mass and the forces produced by the tripod of legs of the cockroach are modeled with a single, actuated linear spring.
Credit: John Schmitt, Oregon State University
Download the high-resolution JPG version of the image. (159 KB)
Use your mouse to right-click (Mac users may need to Ctrl-click) the link above and choose the option that will save the file or target to your computer.
Oregon State University engineer John Schmitt.
Credit: John Schmitt, Oregon State University
Download the high-resolution JPG version of the image. (1.1 MB)
Use your mouse to right-click (Mac users may need to Ctrl-click) the link above and choose the option that will save the file or target to your computer.