
Multimedia Gallery

{kind=link}
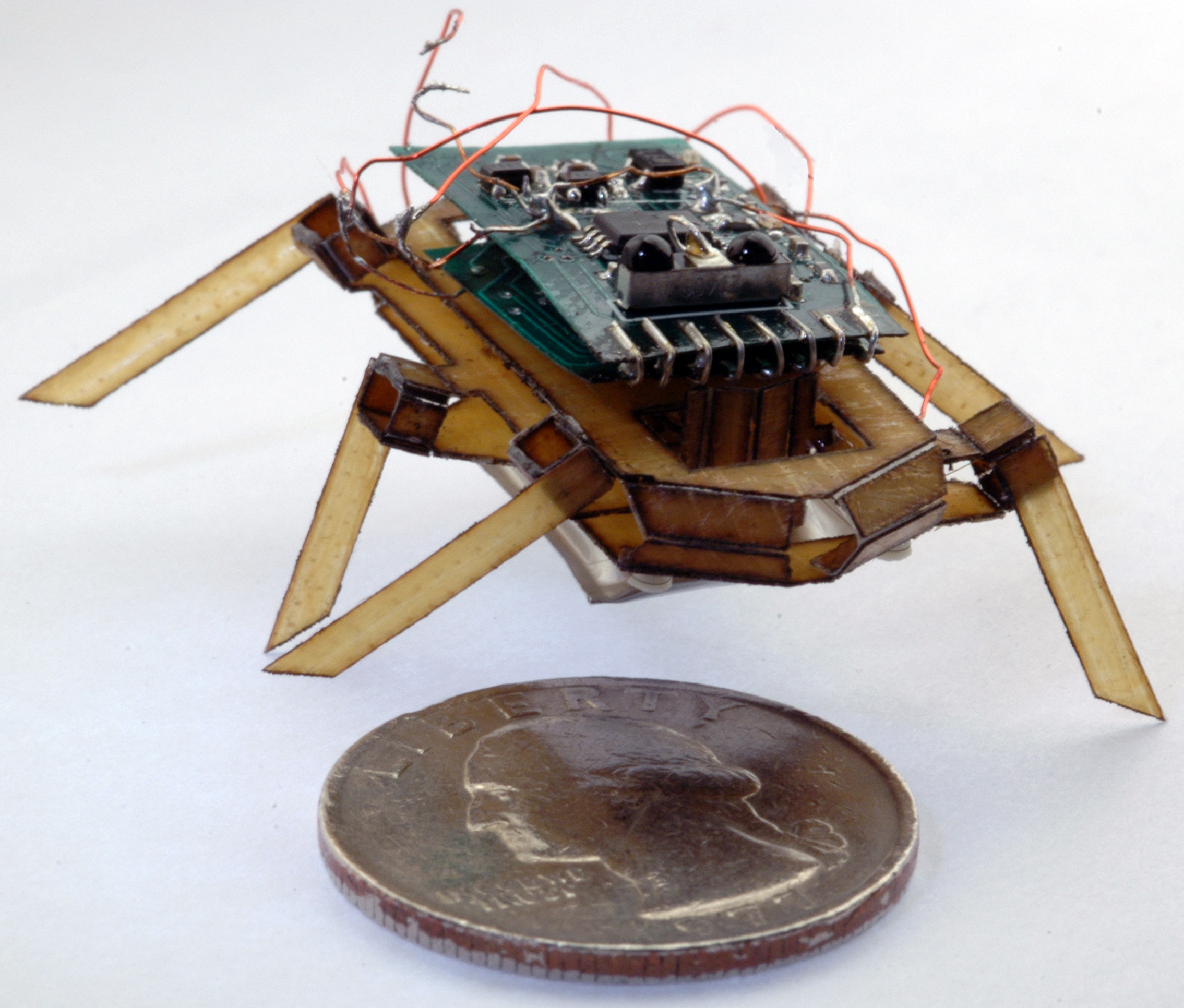
Tiny robots move like the common cockroach, sharing its gait, stride and other dynamics.
Ronald Fearing has been developing biomimetic robots capable of remarkable feats of speed and maneuverability. With his team at the University of California, Berkeley, he designs robots to share traits with insects, lizards and other animals. One insect model they used for their designs is the common cockroach, sharing its gait, bouncing characteristics, stride frequency and other dynamics.
To create the miniRoACH (RObotic Autonomous Crawling Hexapod), Fearing and graduate students Aaron Hoover and Erik Steltz invented a scaled version of the rapid prototyping method known as the smart composite microstructure (SCM) process.
Learn more in the NSF special report A Foundation for Robotics: Designing cooperative, intelligent systems of the future.Credit: A. Hoover, UC Berkeley
Images credited to the National Science Foundation, a federal agency, are in the public domain. The images were created by employees of the United States Government as part of their official duties or prepared by contractors as "works for hire" for NSF. You may freely use NSF-credited images and, at your discretion, credit NSF with a "Courtesy: National Science Foundation" notation.
Additional information about general usage can be found in Conditions.
Also Available:
Download the high-resolution PNG version of the image. (5.2 MB)
Use your mouse to right-click (Mac users may need to Ctrl-click) the link above and choose the option that will save the file or target to your computer.
Related story: Roach-like robots run, climb and communicate with people