

Investments in engineering research and education are critical building blocks for the nation's future prosperity.
We support engineering research that addresses national challenges — such as smart manufacturing, resilient infrastructure and sustainable energy systems — and brings about new innovations, from biotechnologies to semiconductors.
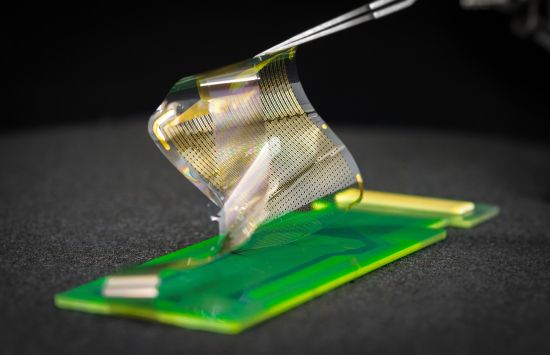
NSF-backed breakthroughs include "smart bandages" to detect infection, a "smart sponge" to clean up oil spills, an ankle exoskeleton that might one day help the mobility-impaired to walk, limb-inspired bridge designs to better withstand earthquakes, high-tech waterproof materials modeled after cicada wings, and much more.
What we support
Chemical engineering
We support the development of new approaches and materials that improve the efficiency, resource use and yield of chemical processes.

Mechanical engineering
We support research on the mechanics of materials and structures, biomechanics, dynamical systems, robotics and more.
Electrical engineering
We support research on electronics, computing, communications, power and quantum technologies for future devices, systems and networks.
ENG Electrical, Communications and Computing Systems
Directorate for Computer and Information Science and Engineering

Civil engineering
We support research on infrastructure materials; architectural, geotechnical and structural engineering; and the design and management of infrastructure systems.

Bioengineering
We support research that integrates engineering and the life sciences to advance biotechnologies and human health.

Environmental engineering and sustainability
We support research on sustainable engineering and systems that support the natural environment, reduce pollution and improve its environmental and human impacts.
Advanced manufacturing
We support research with the potential to revitalize American manufacturing by fundamentally changing manufacturing capabilities, methods and practices.

Operations and design
We support research on design, operations, optimization and control to advance the engineered and socio-technical systems that are critical to society.

Education and training
We support the creation of 21st century engineers across the U.S. through education research and workforce development programs.
Related topics
Featured news


Educational resources
View lesson plans, activities and multimedia for K–12 audiences that focus on exploring engineering.
View the resources