
Multimedia Gallery
June 7, 2010
Images credited to the National Science Foundation, a federal agency, are in the public domain. The images were created by employees of the United States Government as part of their official duties or prepared by contractors as "works for hire" for NSF. You may freely use NSF-credited images and, at your discretion, credit NSF with a "Courtesy: National Science Foundation" notation.
Additional information about general usage can be found in Conditions.
{kind=link}
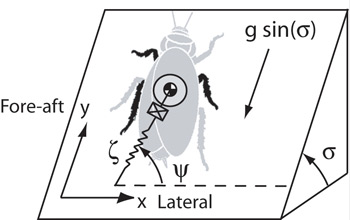
Illustration of model utilized for investigating locomotion performance on inclines.
Illustration of the reduced-order, lateral-plane model utilized for investigating locomotion performance on inclines. The cockroach is modeled by a point mass and the forces produced by the tripod of legs of the cockroach are modeled with a single, actuated linear spring.
Credit: John Schmitt, Oregon State University
Images credited to the National Science Foundation, a federal agency, are in the public domain. The images were created by employees of the United States Government as part of their official duties or prepared by contractors as "works for hire" for NSF. You may freely use NSF-credited images and, at your discretion, credit NSF with a "Courtesy: National Science Foundation" notation.
Additional information about general usage can be found in Conditions.
Also Available:
Download the high-resolution JPG version of the image. (159 KB)
Use your mouse to right-click (Mac users may need to Ctrl-click) the link above and choose the option that will save the file or target to your computer.
Related story: Insects Inspire Robot Design